3D Robot Kollarında Kanal Bükülme Yarıçapını Minimize Eden Geometrik Tasarım Teknikleri
Endüstriyel otomasyonun gelişmesiyle birlikte 3D robot kolları; kaynak, montaj, paketleme, boya ve hassas üretim süreçlerinin vazgeçilmez unsurları hâline gelmiştir. Bu robot kolları, çok eksenli hareket kabiliyetleri sayesinde karmaşık geometrilerde çalışabilirken, beraberinde ciddi bir mühendislik problemini de getirir: hareketli kablo ve hortumların güvenli biçimde yönlendirilmesi. Bu noktada kullanılan hareketli kanallar (enerji zincirleri), robotun hareket özgürlüğünü kısıtlamadan kabloları korumalıdır.
3D robot uygulamalarında en kritik tasarım parametrelerinden biri, kanalın maruz kaldığı bükülme yarıçapıdır. Yetersiz veya kontrolsüz bükülme yarıçapları, kablo ömrünü ciddi biçimde kısaltır, kanal içinde sürtünmeyi artırır ve sistemin güvenilirliğini düşürür. Bu makalede, 3D robot kollarında kanal bükülme yarıçapını minimize ederken sistem güvenliğini koruyan geometrik tasarım teknikleri detaylı biçimde ele alınmaktadır.
Bükülme Yarıçapı Neden Kritiktir?
Bükülme yarıçapı, bir kablo veya enerji zincirinin büküldüğünde oluşturduğu minimum eğrilik çapını ifade eder. Kablolar için bu değer, üretici tarafından belirlenir ve aşılması durumunda:
-
İletken kopmaları
-
İzolasyon çatlakları
-
Ekranlama süreksizlikleri
-
Veri kaybı ve sinyal bozulmaları
gibi sorunlar ortaya çıkar. Enerji zincirleri açısından ise küçük bükülme yarıçapı, zincir segmentleri üzerinde aşırı mekanik gerilme anlamına gelir.
3D Robot Kollarında Bükülme Probleminin Kaynağı
3D robot kolları, lineer sistemlerden farklı olarak aynı anda birden fazla eksende hareket eder. Bu durum, kanalın:
-
Aynı anda bükülme
-
Burulma
-
Açılma–kapanma
hareketlerine maruz kalmasına neden olur. Özellikle omuz, dirsek ve bilek eksenlerinin kesiştiği bölgelerde kanal geometrisi doğru tasarlanmazsa bükülme yarıçapı kritik seviyelere düşer.
Klasik Yaklaşımların Yetersizliği
Geleneksel enerji zinciri uygulamaları genellikle tek eksenli veya sınırlı hareketler için tasarlanmıştır. Bu sistemler 3D robot kollarına doğrudan uyarlandığında:
-
Kanal, tasarlanan minimum yarıçapın altına zorlanır
-
Kablolar zincir içinde sıkışır
-
Yan yük ve torsiyon oluşur
Bu nedenle 3D robot uygulamalarında özel geometrik tasarım yaklaşımları gereklidir.
Geometrik Tasarımın Temel İlkeleri
Hareket Zarfının Tanımlanması
İlk adım, robot kolunun tüm hareket kombinasyonlarını kapsayan hareket zarfının (motion envelope) net biçimde tanımlanmasıdır. Kanalın hiçbir noktada bu zarfın dışına zorlanmaması gerekir. Geometrik tasarım, bu zarfın içine yerleşecek şekilde planlanmalıdır.
Doğal Eğrilik Hatlarının Takibi
Enerji zincirleri, belirli bir doğal bükülme eğilimine sahiptir. Kanalın robot koluna bağlandığı noktalar, bu doğal eğriliği destekleyecek şekilde konumlandırılmalıdır. Zorlanan ters eğrilikler, bükülme yarıçapını aniden düşürür.
Bükülme Yarıçapını Minimize Eden Tasarım Teknikleri
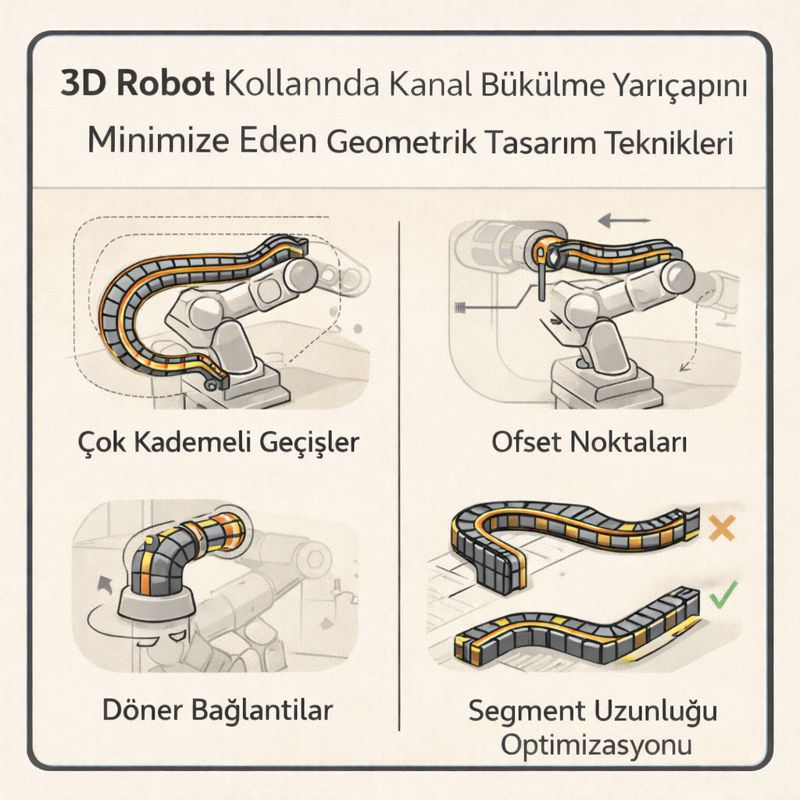
Çok Kademeli Geçiş Geometrileri
Tek bir noktada keskin yön değişimi yerine, çok kademeli ve yumuşak geçişler kullanmak bükülme yarıçapını optimize eder. Bu yaklaşım, kanal üzerindeki gerilmenin daha geniş bir alana yayılmasını sağlar.
Ofsetli Bağlantı Noktaları
Kanalın robot kola bağlandığı noktaların eksenle tam hizalı olması her zaman ideal değildir. Stratejik ofsetler, kanalın daha geniş bir yay çizerek hareket etmesine olanak tanır ve minimum bükülme yarıçapını korur.
Döner Bağlantı Elemanları
Bazı uygulamalarda, kanal giriş noktalarına eklenen döner bağlantı elemanları, burulmayı azaltarak bükülme yarıçapının sabit kalmasına yardımcı olur. Bu elemanlar, kanalın robot hareketlerine daha serbest uyum sağlamasını mümkün kılar.
Segment Uzunluklarının Optimizasyonu
Enerji zinciri segmentlerinin uzunluğu, bükülme davranışını doğrudan etkiler. Çok kısa segmentler aşırı rijitlik yaratırken, çok uzun segmentler kontrolsüz hareketlere yol açabilir. Segment uzunluklarının robotun hareket frekansına göre optimize edilmesi gerekir.
Kablo Yerleşiminin Geometriye Etkisi
Kanal geometrisi ne kadar iyi tasarlanırsa tasarlansın, kabloların kanal içindeki yerleşimi bükülme yarıçapını etkiler. Kabloların:
-
Kanal içinde serbest hareket edebilmesi
-
Birbirine baskı yapmaması
-
Kanal duvarlarına sıkışmaması
gereklidir. Yanlış yerleşim, kanal geometrisinin sunduğu avantajları ortadan kaldırır.
Simülasyon ve Dijital Doğrulama
Modern tasarım süreçlerinde, 3D robot ve kanal geometrisi birlikte simüle edilmelidir. Dijital simülasyonlar sayesinde:
-
Kritik bükülme noktaları
-
Aşırı zorlanan eksenler
-
Olası çarpışma ve sıkışmalar
önceden tespit edilebilir. Bu yaklaşım, saha denemelerinden kaynaklanan maliyetleri önemli ölçüde azaltır.
Sahada Sık Yapılan Tasarım Hataları
3D robot uygulamalarında en sık karşılaşılan hatalar şunlardır:
-
Kanalın yalnızca tek hareket senaryosuna göre tasarlanması
-
Minimum bükülme yarıçapı değerlerinin göz ardı edilmesi
-
Kanalın robot koluna çok yakın konumlandırılması
-
Burulma etkisinin hesaba katılmaması
Bu hatalar, erken kablo arızalarına ve plansız duruşlara yol açar.
Uzun Vadeli Performans Açısından Kazanımlar
Doğru geometrik tasarım teknikleri uygulandığında:
-
Kablo ve hortum ömrü uzar
-
Kanal segmentlerinde aşınma azalır
-
Robot kolu daha stabil çalışır
-
Bakım periyotları uzatılabilir
Bu kazanımlar, yalnızca teknik değil; aynı zamanda ekonomik avantajlar da sağlar.
Sonuç
3D robot kollarında kanal bükülme yarıçapı, sistem güvenilirliğini belirleyen en kritik parametrelerden biridir. Bu yarıçapı minimize etmeye çalışırken kablo ve kanal sınırlarının aşılması, uzun vadede ciddi sorunlara yol açar. Doğru yaklaşım; robot hareket zarfını dikkate alan, doğal eğrilikleri destekleyen ve çok eksenli hareketlere uyum sağlayan geometrik tasarım tekniklerini uygulamaktır.
Geometri odaklı tasarım, enerji zincirlerini robot sistemlerinin zayıf halkası olmaktan çıkarıp, uzun ömürlü ve güvenilir bir bileşen hâline getirir.



