Lineer Robot Hatlarında Enerji Zinciri Burulma Sınırı Analizi
Endüstriyel otomasyon sistemlerinde lineer robot hatları, yüksek hız, tekrarlanabilirlik ve hassasiyet gerektiren uygulamaların omurgasını oluşturur. Bu sistemlerde yalnızca robotun mekanik doğruluğu değil, robotla birlikte hareket eden kablo ve hortumların güvenli şekilde taşınması da kritik öneme sahiptir. Enerji zincirleri, tam da bu noktada devreye girerek elektrik kablolarını, veri hatlarını ve pnömatik-hidrolik hortumları kontrollü bir güzergâhta taşır.
Ancak lineer robot hatlarında sıkça göz ardı edilen bir konu vardır: enerji zincirinin burulma sınırı. Doğrusal hareket esaslı sistemlerde dahi, yanlış tasarım veya montaj nedeniyle zincirler torsiyonel zorlanmaya maruz kalabilir. Bu durum, zincirin ömrünü ciddi şekilde kısaltırken, kablo arızalarına ve beklenmedik duruşlara yol açar.
Enerji Zincirlerinde Burulma Nedir?
Burulma, bir yapının kendi ekseni etrafında dönmeye zorlanması sonucu oluşan mekanik gerilimdir. Enerji zincirleri esasen belirli bir eksende bükülmek üzere tasarlanır; yani kontrollü bir eğilme hareketine izin verirler. Buna karşın eksen dışı kuvvetler zincirin tasarım dışı davranmasına neden olur.
Lineer robot hatlarında ideal senaryoda enerji zinciri yalnızca ileri–geri doğrusal hareket yapar. Ancak pratikte şu durumlar burulmaya yol açabilir:
-
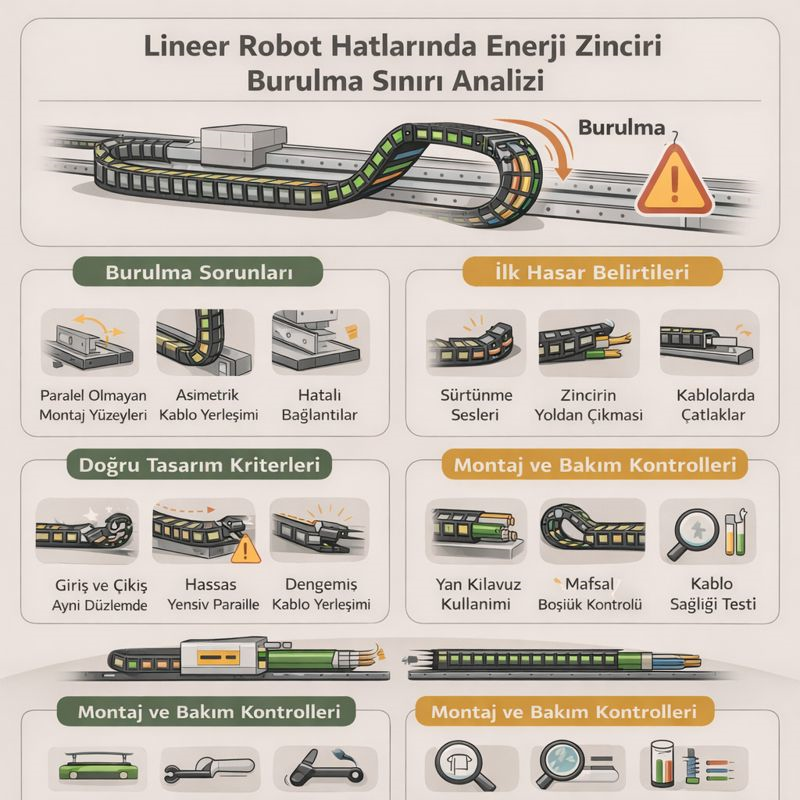
Montaj yüzeylerinin paralel olmaması
-
Zincirin giriş ve çıkış noktalarının eksen kaçıklığı
-
Hareket sırasında oluşan titreşimler
-
Zincir içinde düzensiz yerleştirilmiş kablolar
-
Zincirin nominal yük kapasitesinin aşılması
Bu koşullar altında zincir, fark edilmeden torsiyonel stres biriktirmeye başlar.
Lineer Robot Hatlarında Burulmanın Kaynakları
Lineer robot sistemleri teoride basit görünse de, pratikte çok eksenli etkilere maruz kalır. Özellikle yüksek hızlarda çalışan robotlarda ivmelenme ve yavaşlama anları, enerji zinciri üzerinde ani yük değişimleri yaratır.
Burulmanın en sık rastlanan kaynakları şunlardır:
-
Yan yükler: Zincirin yanlardan desteklenmemesi veya yanlış yönlendirilmesi
-
Asimetrik kablo yerleşimi: Ağır kabloların tek tarafta yoğunlaşması
-
Zincir uzunluğunun yanlış seçimi: Fazla uzun zincirlerde kontrolsüz salınım
-
Taşıyıcı arabaya hatalı bağlantı: Dönme momenti oluşturan bağlantı noktaları
Bu faktörler tek başına küçük etkiler gibi görünse de, sürekli tekrar eden hareketlerde birikimli hasara yol açar.
Burulma Sınırı Neyi İfade Eder?
Enerji zincirlerinde burulma sınırı, zincirin güvenli şekilde tolere edebileceği maksimum torsiyon miktarını ifade eder. Bu sınır aşıldığında zincirin mafsal noktalarında aşınma hızlanır, bağlantı elemanları gevşer ve zincirin hareket karakteristiği bozulur.
Burulma sınırı yalnızca zincirin kendisiyle ilgili değildir. Zincir içinde taşınan kablolar da torsiyona karşı belirli toleranslara sahiptir. Zincir burulduğunda, kablolar kendi içinde dönmeye zorlanır; bu da damar kopmaları, ekranlama hasarları ve iletim kayıpları gibi sonuçlar doğurur.
Mekanik Hasarın İlk Belirtileri
Burulma kaynaklı hasarlar genellikle ani bir kopma şeklinde ortaya çıkmaz. Aksine, belirli belirtilerle kendini önceden haber verir:
-
Zincirin belirli noktalarda düzensiz ses çıkarması
-
Hareket sırasında zincirin “kendi yolundan çıkması”
-
Mafsal bölgelerinde gözle görülür aşınma
-
Kablolarda erken izolasyon çatlakları
-
Robotun belirli pozisyonlarında artan titreşim
Bu belirtiler göz ardı edildiğinde, zincir yalnızca kendisi değil, bağlı olduğu tüm sistem için risk oluşturmaya başlar.
Tasarım Aşamasında Burulma Analizi
Enerji zincirlerinde burulma riskini azaltmanın en etkili yolu, daha tasarım aşamasında doğru analiz yapmaktır. Lineer robot hatları için enerji zinciri seçilirken yalnızca strok uzunluğu değil, hareket profili de dikkate alınmalıdır.
Dikkat edilmesi gereken başlıca tasarım kriterleri şunlardır:
-
Zincirin tek eksende çalışacağı şekilde hizalanması
-
Giriş ve çıkış noktalarının aynı düzlemde olması
-
Zincir genişliğinin kablo sayısına göre dengeli seçilmesi
-
Gerekirse yan kılavuz veya destek elemanları kullanılması
Bu yaklaşım, zincirin torsiyon yerine yalnızca öngörülen eğilme hareketini yapmasını sağlar.
Montaj ve Kablolama Etkisinin Önemi
Doğru zincir seçimi, yanlış montajla işlevini yitirebilir. Özellikle kabloların zincir içine yerleştirilme biçimi burulma davranışını doğrudan etkiler.
Kablolar zincir içine sıkıştırılmamalı, birbirine dolanmayacak şekilde serbestçe hareket edebilmelidir. Ağır kabloların zincirin merkezine yakın yerleştirilmesi, torsiyon momentini azaltır. Ayrıca kabloların her iki uçta da gerilimsiz bırakılması, burulmanın kabloya iletilmesini önler.
Bakım Sürecinde Burulma Kontrolü
Lineer robot hatlarında enerji zinciri genellikle “sessiz çalışan” bir bileşen olduğu için bakım süreçlerinde ihmal edilir. Oysa düzenli kontrol, burulma kaynaklı hasarları erken aşamada yakalamayı sağlar.
Bakım sırasında şu kontroller yapılmalıdır:
-
Zincirin doğrusal hat üzerinde düzgün ilerleyip ilerlemediği
-
Mafsal boşluklarının artıp artmadığı
-
Zincirin belirli pozisyonlarda zorlanıp zorlanmadığı
-
Kablolarda dönme izlerinin olup olmadığı
Bu kontroller, plansız duruşların ve yüksek maliyetli arızaların önüne geçer.
Sonuç
Lineer robot hatlarında enerji zincirleri, yalnızca kablo taşıyan pasif elemanlar değildir. Sistem dinamiğinin aktif bir parçasıdır ve maruz kaldıkları burulma, tüm hattın güvenilirliğini etkiler. Burulma sınırının aşılması, zincir ömrünü kısaltmakla kalmaz; kablo arızaları, üretim kayıpları ve güvenlik riskleri doğurur.
Doğru tasarım, dikkatli montaj ve düzenli bakım ile enerji zincirlerinde burulma kontrol altına alınabilir. Böylece lineer robot hatları, planlanan performansı uzun yıllar boyunca güvenli şekilde sunmaya devam eder.



